خط کش دیجیتال چیست؟
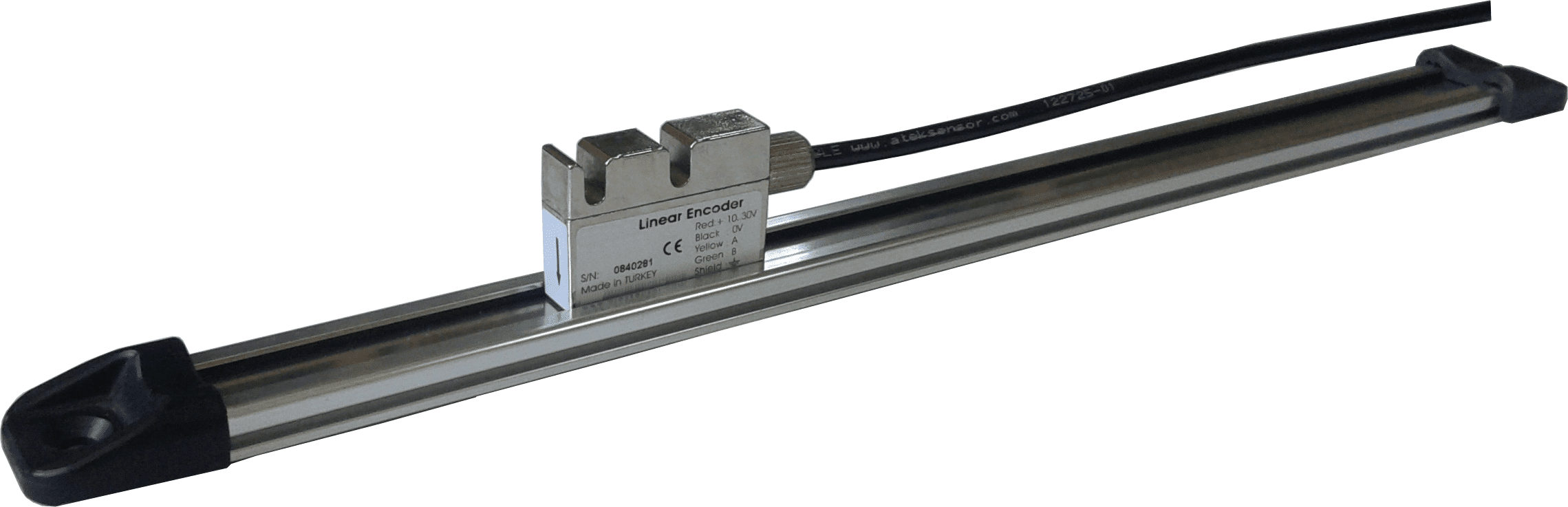
خطکش دیجیتال (Linear Encoder) که براي کنترل سيستمهاي NC و CNC مورد استفاده قرار گيرد به ابزاری گفته می شود که بتوان با آن مقدار جابجائی بر حسب متر، ميلی متر و ميکرو متر را به سيگنال الکتريکی تبدیل کنیم و آن سیگنالهای الکتریکی را به نمایشگر یا کنترلر دستگاه انتقال دهیم.باید به این نکته هم اشاره کرد روتاری انکدرها نیز هم خانواده ی خط کش های دیجیتال می باشند که میزان جابجایی دورانی را محاسبه می کند
در خطکشهای دیجیتال طولهای مختلف (از چندسانتیمتر تا حدود یکصد متر) و تکنولوژی های متفاوت مغناطیسی ،نوری و…)و با ولتاژهای تغذیه مختلف(پنج ولت ، دوازده ولت ، بیست وچهار ولت و …) و شکل موج های مختلف سیگنال خروجی (سینوسی ، مربعی و …) و اشکال مختلف فیزیکی ارائه می گردد .
سیگنالهای خروجی از خطکش دیجیتال یا به نمایشگرها وصل می گردد تا در آن پردازش انجام شده و مستقیما به نمایش در آیند و یا اینکه وارد کنترلرها شده و جهت تحلیل اندازه گیری سرعت ،سنجش سرعت و شتاب و … استفاده می شوند.
همیشه به منظور وصل نمودن یک خطکش به نمایشگر یا کنترلر باید به همخوانی مشخصات آنها دقت گردد . در بسیاری از نمایشگرها و کنترلر های جدید امکان معرفی برخی از مشخصات خطکش فراهم شده است ولی با این وجود بایستی آیتم های بالا مد نظر قرار گیرد .
از جمله ویژگی های بارز خط کش دیجیتال Sino که به آن میتوان اشاره کرد:
تلرانس 0.5 ± میلیمتر است
دقت بسیار بالا
سرعت حرکت : 60 متر بر دقیقه
منبع تغذیه : 5v – 80 mA
طول کابل استاندارد: 3 متر (طولهای دیگر طبق سفارش)
دمای کاری صفر تا 45 درجه سانتیگراد
راهنمای نصب خط کش KA300/KA500/KA600
1- فاصله هد وخط کش سه میلیمتر می باشد (بعلاوه و منهای نیم میلیمتر )
2- خط کش کاملا بموازات محور نصب شود بعبارت دیگر خط کش بعد از نصب از دو جهت ساعت شود .
3-خط کش را طوری نصب نمایید که گردو غبار و مایعات به خط کش نفوذ نکند.
4-کابلهای رابط را از مسیری عبور دهید که ایمن باشد و با بست روی بدنه دستگاه نصب نمایید.
5-اگر طول خط کش کوتاه تر از کورس دستگاه است خطا محسوب شده و توصیه میگردد از خط
کش بزرکتری استفاده نمایید در هر صورت اگر طول خط کش کوتاه است استوپ مکانیکی نصب
نمایید به میکروسویچ ها اطمینان نکنید در هر حال اگر هد به انتهای خط کش برخورد کند
خط کش معیوب می شود.
6-جنانچه به هر علت (دمونتاژ ماشین و دستکاری و… ) هد از خط کش خارج شد آن را جا نزنید و
به تعمیرکاران ماهر بسپارید.
7- هنگام انجام تعمیر مکانیکی و مشابه روی دستگاه تعمیرکاران را از وجود خط کش روی
ماشین مطلع فرمایید.
8- در صورتی که دستگاه شما لقی دارد بهتر است لقی را برطرف نمایید لقی هایی که عمود بر محور
حرکت باشد باعث کاهش عمر خط کش می شود همچنین دقت اندازه گیری را کاهش مید هد.
9–گارانتي يعني تعمير رايگان قطعه معيوب و در صورت عدم تعمير تعويض قطعه معيوب در دفتر فروش
فروشنده كالا – بنابراين قطعه معيوب جهت تعمير و يا تعويض بايستي توسط خريداربه دفتر فروش
ارسال گردد – در صورتي كه كارفرما جهت تشخيص عيب وباز وبسته نمودن قطعه در خواست حضور
كارشناس نمايد هزينه مربوطه را نيزمی پردازد.
10- ايرادات مربوطه به كابلهاي ارتباطي (كارفرما بايستي مسير هاي عبوركابل را ايمن نگه دارد )
دستكاري تنظيمات دستگاه ، دستكاري پارامتر ها جزء گارانتي دستگاه نيست و رفع آن با هزينه
همراه است .
11- كابل هاي ارتباطي بايستي از نوع مرغوب و مطابق دستورات نصب انتخاب گردد.
12- در صورت نفوذ آب يا مايعات ديگر – شكستگي و سائيدگی شديد – نفوذ قطعات ريز فلزات به
داخل تجهيزات اندازه گيري ،دستگاه از گارانتي خارج مي گردد .
13- دستورات نصب خط كش بايستی مطابق دفترچه راهنما و توسط کارشناس انجام شود.
14- گارانتي قطعات تضمين كننده سلامت و كاركرد مناسب قطعات فروخته شده مي باشد عدم
هماهنگي قطعه فروخته شده با ديگر تجهيزات کارفرماجزء گارانتي نمي باشد .(مثل ناهماهنگی بین
کامپیوتر و خط کش یا خط کش با مارک دیگری از نمایشگر و…چنانچه خط کش و نمایشگر از یک
مارک انتخاب شود این مشکل وجود ندارد و شامل گارانتی می شود )
15- قطعات پلاستیکی دو طرف هد بعد از نصب باز گردد این قطعات جهت حمل خط کش است و در
هنگام کار بایستی باز گردد.
16- سیم ارت نمایشگر را به ارت کارخانه متصل کنید.
17- جهت حفاظت بهتر خط کش بهتر است از کاور استفاده نمایید. کاور فابریک آماده فروش می باشد.
خط کش دیجیتال (Linear Encoder) به ابزاری اطلاق میگردد که می تواند میزان جابجایی ماشین را با دقت میکرون اندازهگیری نموده و بصورت سیگنالهای الکترونیکی به نمایشگر یا کنترلر دستگاه انتقال دهد .
(روتاری انکودر ها نیز هم خانواده خط کش های دیجیتال هستند که میزان جابجایی دورانی را اندازه می گیرند) .
خط کشهای دیجیتال با طولهای مختلف (از چندسانتیمتر تا حدود یکصد متر) و با تکنولوژی های مختلف (نوری ، مغناطیسی و…)و با ولتاژهای تغذیه متفاوت (پنج ولت ، 12 ولت ، 24 ولت و …) و شکل موج های مختلف سیگنال خروجی (مربعی ، سینوسی و …) و شکل های مختلف فیزیکی عرضه میگردد که در ادامه به شرح آن میپردازیم .
سیگنالهای خروجی از خط کش دیجیتال یا به نمایشگرها متصل میشوند تا در آن پردازش شده و مستقیما نمایش دادهشوند و یا اینکه وارد کنترلرها شده و جهت تحلیل میزان جابجایی ، اندازه گیری سرعت و شتاب و … بکار میروند .
همواره جهت اتصال یک خط کش به نمایشگر یا کنترلر بایستی به همخوانی مشخصات آنها توجه نمود . در بسیاری از نمایشگرها و کنترلر های جدید امکان معرفی برخی از مشخصات خط کش فراهم شده ولی با این وجود بایستی آیتم های فوق مد نظر قرار گیرد .
خط کش ها را می توان با توجه به مشخصات آنها دسته بندی کرد که بخشی از دسته بندی ها به شرح زیر است :
الف) تکنولوژی تولید :
– خط کش نوری یا شیشه ای یا OPTIC :
در این خط کشها یک منبع فرستنده نور و یک گیرنده حساس به نور وجود دارد . در هنگام
جابجایی نور توسط خطوطی که روی شیشه یا فلز حک شده قطع میگردد . تعداد قطع و وصل
شدن خطوط نور متناسب با میزان جابجایی بوده و به شکل سیگنال الکتریکی از خطکش خارج
میگردد . در خط کش های نوری منبع نور میتواند مرئی یا نامرئی باشد . همچنین خطوطی که نور را قطع میکند میتواند روی شیشه یا فلز حک شده باشد . عموما در خط کش ها از شیشه استفاده شده است . با این حال استفاده از فلز نیز مرسوم است . خطکشهای شیشه ای از حدود چند سانتیمتر تا حدود سه متر تولید می گردد . طولهای بزرگتر از سه متر به جهت مشکلات حمل و نقل تولید نمیگردد . چنانچه طولهای بالاتر از سه متر مد نظر باشد بایستی از تکنولوژی خط کشهای نوری فلزی استفاده کرد .
در این خط کش ها نور به سطح فلز تابانده شده و و نور منعکس شده مورد تحلیل قرار می گیرد روی این خط کش ها نوارهای کدر و براق وجود دارد که می تواند نور را منعکس کرده و یا منحرف نماید .
این خط کشها بصورت قطعات مجزا حمل شده و در کنار دستگاه مونتاژ می گردند . در این خط کشها پروفیل بدنه چند تکه شده و در محل دستگاه روی هم مونتاز می گردد . اما خط کش اصلی که بصورت یک نوار فلزی نازک است بصورت رول حمل شده و بعد از مونتاژ بدنه به داخل آن هدایت شده و نصب می گردد .
خطکش مغناطیسی :
خطکشهای مغناطیسی شامل یک نوار مغناطیسی به پهنای حدود ده میلیمتر و ضخامتی کمتر از دو میلیمتر است که روی آن بوسیله مغناطیس کدگذاری شده است و یک سنسور یا هد که در نزدیکی نوار حرکت کرده و از آن متاثر شده و سیگنالهایی را متناسب با میزان جاجایی صادر می کند. خطکشهای مغناطیسی معمولا دارای IP بالا بوده و قیمت آنها در مقایسه با خطکشهای نوری برای طول های بالاتر از یک متر ارزان تر میباشد .این خطکشها با رزولیشن پنج میکرون و یک میکرون عرضه می گردد.
مهمترین مزیت این خطکش امکان ارائه آن تا حدود پنجاه متر و قیمت فوق العاده ارزان آن در طولهای بلند(بالای دو متر) است . مزیت دیگر این خطکشها عدماتصال فیزیکی بین هد و خطکش است . به عبارت دیگر هد در نزدیکی خط کش و با فاصله نصب میگردد.
حداکثر فاصله بین هد و خطکش بسته به شرکت تولید کننده متفاوت است در مورد خط کش های ateksensor این فاصله حدود 2.5 میلیمتر است .
این خطکشها بصورت برچسب بوده و روی بدنه ماشین نصب می گردد و لازم است روی ماشین مسیر ماشین کاری شدهای جهت نصب خطکش مهیا نمود.
اخیرا به منظور رفع این مشکل شرکت Ateksensor پروفیلی آلومینیومی ارائه نمودهاند که میتواند روی سطوح ناصاف نیز نصب شود و یک بستر مناسب جهت نصب خطکش مهیا نماید . همچنین شرکت Ateksensor یک پروفیل مشابه پروفیل خطکشهای نوری ارائه کرده است که کار نصب را سادهتر می سازد . این پروفیل ها نیز روی هم مونتاژ میشوند تا طول مورد نظر را مهیا کنند .
– تکنولوژی Spherosyn
این تکنولوژی که در خطکشهای ساخت شرکت NEWALL نیز دیده می شود شامل یک لوله فولادی است که درداخل آن ستونی از ساچمه های بسیار دقیق قراردارد . هد نیز روی این لوله در حال حرکت است . داخل هد 24 بوبین قرار داده شده که با خاصیت القایی نسبت به جابجایی متاثر شده و یک سیگنال خروجی متناسب به میزان جابجایی صادر می نماید . از مزایای این خطکش دوام بالا و داشتن IP67 است و در مقابل آلودگی بسیار مقاوم است.
دسته بندی خط کشها از نظر نوع سیگنالهای خروجی( مقدار ولتاژ یا جریان )
-پنج ولت TTL: مرسومترین نوع خطکش نوع پنج ولت TTL است . این خط کشها متناسببا میزان جابجایی تعدادی موج مربعی از خود صادر میکنند که ولتاژ سطح یک آنها پنج ولت وولتاژ سطح صفر آنها صفر ولت است . نمایشگرها یا کنترلرها تعداد موجهای خروجی را شمارشنموده و میزان جابجایی را نشان میدهند.
– موج مربعی 12ولت یا 24 ولت: خطکشهای قدیمیتر با ولتاژ 12 ولت کار می کردند . بهعبارت دیگر این خط کشها متناسب با میزان جابجایی تعدادی موج مربعی تولید میکردند که
سطح ولتاژ آن 12 ولت بود. خطکشهای 24 ولت بیشتر به خاطر سهولت اتصال به کنترلرهای 24 ولتی نظیر PLC ها ساخته شدند که تنها تفاوت آنها با خط کشهای TTLسطح ولتاژ آنهاست .
– خطکشهای مولتیولتاژ موج مربعی : برخی از شرکتها ازجمله Ateksensor به فکر
افتادند خطکشهایی را تولید کنند که با تمامی ولتاژهای فوق سازگار باشند و سرانجام
خطکشهایی را تولید کردند که ولتاژ کاری آنها بین 5 تا 30 ولت متغیر بوده و می توانند در
مدارهای 5 ، 12 و 24 ولتی به خوبی کار کنند .
برخی از شرکتها ازجمله Ateksensor این خط کش ها را HTL نامیدند.( جهت دریافت
– خطکش با خروجی RS422 : خطکشهای دیجیتال حداقل دارای دو سیگنال خروجی به
نام A و B می باشند . سیگنال A و B مشابه بوده و فقط نسبت به هم دارای اختلاف فاز هستند .
تعداد پالسهای شمارش شده متناسب با میزان جابجایی و تقدم و تاخر سیگنالها (نسبت به
همدیگر) معرف جهت حرکت است. خطکشها معمولا دارای سیگنال دیگری با نام Z یا R یا …
هستند که سیگنال رفرنس نامیده میشود . (رفرنس معرف یک نقطه فیزیکی روی خطکش است
خطکش با خروجی RS422 عموما به خطکشی اطلاق میگردد که علاوهبر سیگنالهای A و
Bو Z دارای سیگنالهای A-not ، B-not و Z-not میباشد. سیگنال A-not سیگنالی
مشابه A با 180درجه اختلاف فاز میباشد. این خطکشها عمومادر CNC ها کاربرد دارند و
درمقابل نویز مقاومتر هستند.(خط کش های سریMLS110 , MLS120 , MLS130 MLC320 LTS, MLC310 از شرکت اتک سنسور بدون داشتن اختلاف قیمت بصورت RS422 نیز قابل ارائه است)
– یکولت سینوسی: سیگنال خروجی این خطکشها یک موج سینوسی با دامنه پیکتاپیک یک ولت است و تعداد موج های تولید شده و مقدار لحظهای آن متناسب با میزان جابجایی می باشد.البته خط کش های سینوسی با ولتاژ پنج ،دوازده و پانزده ولت نیز در خط کش های قدیمیتر دیده می شود .
– نوع جریانی: در این نوع خطکشها یک موج سینوسی از نوع جریان تولید می گردد که تعداد موج و مقدار لحظه ای آن متناسب با جابجایی خط کش میباشد . معمولا خط کش های سینوسی قدیمی هستند و دیگر تولید نمی شوند بخشی از خط کش های سینوسی موجود ،تولید شرکت هایدن هان هستند ( مثل خط کش LS403)
– البته انواع دیگری نیز وجود دارند .
ج) رزولیشن خط کش دیجیتال
– خطکشهای جدید معمولا دارای رزولیشن 5میکرون ، 1 میکرون و نیم میکرون هستند پیش ازاین خطکشهای 2 میکرون و 10 میکرون نیز مرسوم بود. در هنگام جایگزین کردن خط کش ها یا بایستی خط کش با همان رزولیشن را تهیه کنیم و یا اینکه امکان معرفی رزولیشن جدید را روی نمایشگر یا کنترل داشته باشیم نمایشگر های جدید معمولا چند رزولیشن متفاوت را قبول می نماید در نمایشگر های جدید شرکت ATEKSENSOR امکان تعریف رزولیشن جدید علاوه بر رزولیشن های معمول وجود دارد. چنانچه رزولیشن خط کش مناسب انتخاب نگردد و یا تنظیمات لازم روی نمایشگر یا کنترلردرست انجام نشود مقدار نمایش داده شده ضریبی از طول واقعی خواهد بود.
د) شکل فیزیکی خطکش دیجیتال
– خطکشهای معمولی :
خطکشها دارای شکل و ابعاد فیزیکی مختلفی هستند. معمولا خطکشهای بزرگتر قطورترند . مثلا شرکت Ateksensor خطکشهای تا یک متر را با ابعادی باریکتر (سری ALS4) و خط کش های بالای یک متر را با ابعادی قطورتر (ALS6) تولید میکند. البته این موضوع همواره صادق نیست مثلا شرکت ISKRA خط کش های تا حدود دو متر را نیز در سایز باریک (TGM111 ) تولید می کند این شرکت خط کش های قطور را نیز با این طول ارائه می نماید ( سری TGM170).
– خطکشهای مغناطیسی معمولا به صورت یک نوار قابل انعطاف به عرض 10 میلیمتر و ضخامت کمتر از 2 میلیمتر به همراه یک هد ( کوچکتر از یک قوطی کبریت ) ارائه میگردد.
این خط کشها کم جحم ترین نوع خط کش هستند و از آنجا که قابل انعطاف هستند بصورت رول های پنجاه متری حمل میگردد وبه اندازه طول مورد نیاز مشتری بریده شده و نصب میگردد قیمت این خط کش ها در طولهای بالاتر از یک و نیم متر ارزان تر از دیگر خط کشها می باشد این خط کشها بصورت پشت بر چسب بوده و می تواند روی بدنه ماشین چسبانده شود.
اخیرا شرکت Ateksensor خطکشهایی را تولید کرده که ظاهری قطور دارند و به شکل خطکشهای نوری میباشند ( سری MLC310 ) اما در داخل آن از همین خط کش ها استفاده شده است . این خطکشها از نظر کاربری و نصب مانند خطکشهای نوری هستند با این تفاوت که دارای درجه حفاظت بالاتری (IP67) می باشند.
– خطکشهای مغناطیسی سیلندری: ظاهر این خطکشها مانند یک سیلندر پنوماتیکی است.
یعنی یک استوانه که ازداخل آن یک میله خارج میگردد .(سری LTS ساخت شرکت اتک سنسور ) و مناسب نصب روی سیلندر های هیدرولیک ، گیوتین ها و… می باشند.این خط کش ها تا طول حدود هفتاد سانت تولید میگردد ( خروجی این خط کشها پنج ولت TTL است و فقط ظاهر آنها مشابه خط کشهای اهمی می باشد)
– خطکش مخصوص برکپرس : این خطکشها سری MLC420 و سری MLC410
برای دستگاههایی مثل گیوتین، برکپرس، نورد و … کاربرد دارد . در این دستگاهها قطعه متحرک که هد خط کش قرار است به آن متصل شود دقیقا به موازات خطکش حرکت نمیکند و استفاده از خطکشهای معمولی در این ماشینها ممکن نیست و لازم است از خط کش هایی استفاده شود که خودشان دارای یک گاید
جهت حرکت مستقیم هد دارند . بعبارت دیگر خط کش برک پرس همان خط کش معمولی است که یک گاید نیز به آن اضافه شده است هد خط کشهای برک پرس معمولا با یک سری اتصالات قرقری (قابل انعطاف ) به دستگاه متصل میگردد.
– خط کش های میله ای شکل :
این خط کش ها که با برند NEWALL و SONY دیده می شود شامل یک میله و یک هد است که میله از داخل سوراخ هد عبور داده شده است این خط کش ها به واسطه شکل فیزیکی که دارند بسیار با دوامند .
تقسیمبندی خطکشها از نظر دقت (accuracy) :
– خطکشها می توانند با دقتهای مختلفی عرضه شوند. خطکشهای نوری دقتی حدود 10 میکرومتر در متر دارند. البته میتوان خطکشهایی با دقت بالاتر نیز درخواست نمود. این دقت درمورد خطکشهای مغناطیسی کمتر و حدود 20 میکرون بر متر یا 40 میکرون بر متر است.
شرکت Ateksensor خطکشهای مغناطیسی با دقت 20 میکرون بر متر را نیز عرضه کردهاست. بهطور معمول با بالارفتن میزان دقت قیمت خطکش افزایش می یابد. خطکشهای با دقت10میکرومتر بر متر برای ماشینهای CNC معمولی و ماشینهای منوال مناسب میباشد . همچنین استفاده از خطکشهای مغناطیسی برای ماشینهای منوال مناسب است اگرچه استفاده از این خطکشها در ماشینهای CNC نیز رو به افزایش است.
تقسیم بندی خط کش ها با توجه به سیگنال رفرنس خط کش های دیجیتال طوری طراحی شده اند که وقتی محور ماشین حرکت میکند تعدادی پالس تولید میکنند این پالسها فقط مشخص کننده مقدار جابجایی و جهت جابجایی است ولی موقعیت فعلی ماشین را مشخص نمی کند بهمین جهتوقتی یک ماشین سی ان سی روشن میشود ، عملا کنترل ماشین نمیداند که محور هایش در چه نقطه ای قرار دارند در این حالت به اصطلاح ماشین را رفرنس میکنند رفرنس کردن درحقیقت روشی جهت مشخص کردن موقعیت فعلی ماشین است چگونگی انجام این کار بستگی زیادی به نوع خط کش ماشین دارد
– خط کش های incremental
در روی این خط کش ها ، علاوه بر سیگنال اصلی ، نقاطی به عنوان نقاط مرجع یا رفرنس نشانه گذاری شده اند . وقتی هد خط کش از این نشانه ها عبور میکند ، سیگنال رفرنس یا z صادر میشود و کنترل می تواند از موقعیت محور مطلع شود. سیگنال رفرنس می تواند در یکی از دو انتهای خط کش یا در وسط آن باشد . اخیرا تولید کنندگان روی خط کش ها تعدادی نشانه رفرنس قرار داده که با ترکیب آن با میکرو سوئیچ رفرنس یکی از آنها معتبر میشود. بنابراین در این ماشین ها (در هنگام رفرنس) لازم است محور ماشین طول زیادی از خط کش را طی کرده تا ابتدا به میکروسویچ رفرنس برخورد کرده و پس از آن منتظر دیدن اولین سیگنال رفرنس بماند .این نوع خط کش و این نوع رفرنس رفتن بسیار مرسوم است.بنابراین اگر قرار است خط کش دیجیتال روی ماشینی نصب شود که نیاز به رفرنس رفتن دارد بایستی به موقعیت قرار گرفتن نشانه رفرنس توجه نمود در این حالت یا بایستی خط کشی معادل خط کش قبلی خرید و یا پارامتر های ماشین را مطابق خصوصیات خط کش جدید تغییر داد.
نشانه های رفرنس در خط کش های ساخت شرکت ateksensor و sino بصورت تکراری و با فاصله پنجاه میلیمتر از هم می باشد .
لازم بذکر است که توجه به موقعیت رفرنس خط کش در ماشین های CNC مورد توجه است
و در ماشینهای منوال که سیستم اندازگیری دیجیتال دارد چندان اهمیتی ندارد.
– خط کش Distance Coded :
– در ماشین های بزرگ رفتن به رفرنس به شکل بالا کمی مشکل است و ممکن است وضعیت قطعه کار اجازه ندهد ماشین طول خط کش دیجیتال را طی نماید تا نقطه رفرنس را ببیند و همچنین به منظور صرفه جوئی در وقت و هزینه، سازندگان خط کش بر آن شدند که خطکش های distance coded را بسازند. روی این خط کش ها تعدادی نشانه رفرنس وجود دارد. فاصله بین نشانه های رفرنس مجاور با هم یکسان نبوده و با فرمت خاصی تعریف شده است . کنترلر با اندازه گیری این فاصله ها میتواند موقعیت محور را با یک حرکت کوچک تشخیص میدهد .
در این تکنیک ماشین از دو نشانه رفرنس عبور کرده و با توجه به فاصله بین این دو نشانه، موقعیت خود را تشخیص می دهد. دراین روش بجای اینکه ماشین کل طول خط کش دیجیتال را طی کند فقط فاصله بین دو نشانه رفرنس را طی کرده و با اندازه گیری این فاصله موقعیت خود را پیدا می کند .
خط کش Heidenhain Ls486C از این نوع است .
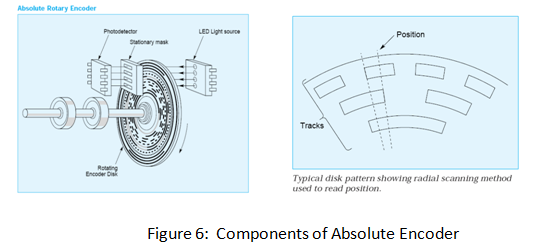
– خط کش دیجیتال Absolute
در ماشینهایی که خط کش absolute دارند بمحض روشن شدن ،کنترولر موقعیت خود را تشخیص می دهند در این خط کش ها جهت دستیابی به موقعیت محور دیگر نیازی به حرکت نیست این خط کش ها بسیار کم کابرد هستند همانطور که در شکل می بینید دو ردیف نشانه گذاری روی خط کش وجود دارد که ردیف پایین مربوط به رفرنس است که بصورت absolute کد گذاری شده و ردیف بالا مشابه خط کش های incremental می باشد.
خط کش Heiden Hain Lc 481 یک نمونه از این خط کش دیجیتال است. از نظر میزان فراوانی خط کشهای incremental پرمصرف ترین خط کش و خط کش های Absolute کم مصرف ترین نوع خط کش هستند و فقط توسط شرکتهای خاصی تولید میگردد
طول خط کش دیجیتال
برای خرید خط کش دیجیتال لازم است کورس مفید خط کش را بدانیم.طول فیزیکی خط کش ها معمولا بزرگتر از کورس مفید آنهاست . فروشندگان خط کش معمولا در مورد طول مفید خط کش صحبت میکنند نه طول فیزیکی آنها .
همچنین توجه داشته باشید حد اکثر کورس حرکتی خط کش ها ممکن است از عددی که روی خط کش دیجیتال نوشته شده بزرگتر باشد. ( این عدد تا 5 سانتی متر هم دیده شده . )
بطور مثال در مورد خط کش دیجیتال MLC410 – 200 mm ساخت شرکت Ateksensor کورس نامی خط کش دیجیتال 200 میلیمتر استدر حالی که حد اکثر کورس واقعی خط کش دیجیتال 230 میلیمتر و طول فیزیکی خط کش 328 میلیمتر می باشد. مهمترین نکته در انتخاب طول خط کش دیجیتال این است که کورس مفید خط کش دیجیتال از کورس حرکتی ماشین بزرگتر باشد برای معین کردن طول خط کش دیجیتال لازم است حداکثر کورس حرکتی ماشین را بدست آورید اگر به کورس حرکتی محدود شده توسط میکروسویچ ها اکتفا کنید در اولین گذر خطا از میگروسویچ ها ،خط کش دیجیتال خواهد شکست .کورس ماشین را با توجه به محدود کننده های مکانیکی معین کنید این محدوده بزرگتر از محدوده ای است که با میکروسویچ ها محدود شده است . از نظر طول ،خط کش ها از چند میلیمتر تا یکصد متر تولید میگردد.
خدمات پس از فروش اطلاعات فنی و خدمات پس از فروش در مورد خط کش های دیجیتال دارای ارزش زیادی میباشد. زمانی که برای اولین بار روی ماشین خط کش دیجیتال نصب میشود ، خرید خط کش دیجیتال بدون اطلاعات فنی یا خدمات پس از فروش به هیچ وجه توصیه نمیشود.اگرچه ممکن است ارزانتر باشد.
در هنگام خرید خط کش دیجیتال توجه داشته باشید که با شعار خدمات پس از فروش مواجه نشوید . عرضه کنندگانی که خدمات خوبی دارند ، معمولا اطلاعات فنی محصولات خود را به صورت سایت اینترنتی ارائه نموده اند و سایت آنها علاوه بر بروشورهای تبلیغاتی حاوی اطلاعات فنی نیز هست.
برخی از عرضه کنندگان به جز اطلاعات فنی ، اطلاعات نصب و سوالات متداول را نیز در سایت خود گنجانده اند و بدون اینکه مشتری باشید میتوانید به این اطلاعات دسترسی داشته باشید.بهتر است در هنگام خرید مشخص کنید که گارانتی شامل چه مواردی میباشد.
برخی از فروشندگان ،قطعات یدکی خط کش هاس دیجیتال را نیز عرضه میکنند و خدمات تعمیری نیز دارند و صرفا فروشنده نیستند.
همچنین برخی از فروشندگان فقط درخواست شما را وارد کرده و میفروشند ولی دسته دیگر دارای موجودی کافی بوده و در هنگام نیاز فورا خط کش دیجیتال مورد نیاز را عرضه میکنند . یک تامین کننده خوب باید بتواند قطعات یدکی را تامین نماید ، اطلاعات فنی قطعات را در دسترس قرار دهد.
انکودر چیست؟
انکودر حسگر حرکت مکانیکی است که سیگنال های دیجیتالی را در پاسخ به حرکت تولید می کند. به عنوان یک دستگاه الکترو مکانیکی ، یک انکودر قادر است اطلاعات مربوط به موقعیت ، سرعت و جهت را در اختیار کاربران سیستم کنترل حرکت قرار دهد. انکودر دو نوع مختلف دارد: خطی و چرخشی. انکودر خطی در طول مسیر به حرکت پاسخ می دهد ، در حالی که انکودر چرخشی به حرکت چرخشی پاسخ می دهد. انکودر به طور کلی با استفاده از خروجی آن طبقه بندی می شود. انکودر افزایشی قطاری از پالس ها را ایجاد می کند که می تواند برای تعیین موقعیت و سرعت مورد استفاده قرار گیرد. یک انکودر مطلق ، پیکربندی های منحصر به فرد بیتی را برای پیگیری مستقیم موقعیت ها ایجاد می کند.
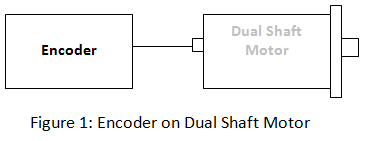
نمودار بلوک برای انکودر
انواع اساسی انکودرها
انکودرهای خطی و دوار به دو نوع اصلی تقسیم می شوند: انکودر مطلق و انکودر افزایشی. ساخت این دو نوع انکودر کاملاً مشابه است. با این حال آنها از نظر خصوصیات فیزیکی و تفسیر حرکت متفاوت هستند.
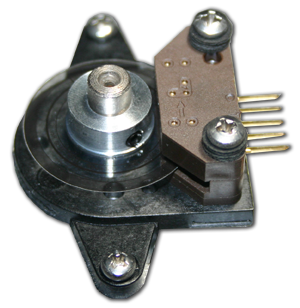
انکودر افزایشی
تک – در داخل
نسخه فلش 9،0 یا بالاتر مورد نیاز است
شما هیچ افزونه فلش نصب ندارید
برای بارگیری آخرین نسخه اینجا را کلیک کنید
انکودر تک پایان
انکودر چرخشی افزایشی نیز به عنوان انکودر کوادراتور شناخته می شود. این نوع انکودر از سنسورهایی استفاده می کند که برای اندازه گیری زاویه ای از شمارش شاخص نوری ، مکانیکی یا مغناطیسی استفاده می کنند.
انکودرهای افزایشی چگونه کار می کنند؟
انکودرهای چرخشی افزایشی از یک دیسک شفاف استفاده می کنند که شامل بخشهای مات است که برای تعیین حرکت از یکدیگر فاصله دارند. از دیود ساطع کننده نور برای عبور از دیسک شیشه استفاده می شود و توسط ردیاب عکس شناسایی می شود. این باعث می شود که انکودر هنگام چرخش قطاری از پالس هایی با فاصله یکسان ایجاد کند. خروجی انکودرهای چرخشی افزایشی با پالس در دور اندازه گیری می شود که برای پیگیری موقعیت یا تعیین سرعت استفاده می شود.
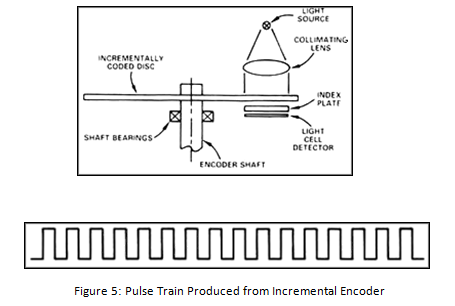
قطار پالس تولید شده از Encoder Encoder
یک خروجی تک کاناله معمولاً در برنامه هایی اجرا می شود که جهت حرکت آنها قابل توجه نباشد. مواردی که در آن سنجش جهت مهم است ، از یک خروجی 2 کانال ، کوادراتور استفاده می شود. دو کانال A و B معمولاً 90 درجه الکتریکی خارج از فاز هستند و اجزای الکترونیکی جهت را بر اساس رابطه فاز بین دو کانال تعیین می کنند. موقعیت یک انکودر افزایشی با جمع کردن تمام پالس ها توسط یک شمارنده انجام می شود.
شکست انکودر افزایشی ، کاهش تعداد است که در هنگام اتلاف برق اتفاق می افتد. هنگام راه اندازی مجدد ، تجهیزات باید به موقعیت داخلی ارجاع داده شوند تا شمارنده مجدداً تولید شود. با این وجود ، برخی از انکودرهای افزایشی وجود دارد ، مانند آنهایی که در آناهیم اتوماسیون فروخته می شوند و مجهز به کانال سوم به نام کانال شاخص هستند. کانال شاخص در هر دور شافت انکودر یک پالس سیگنال منفرد تولید می کند و اغلب به عنوان نشانگر مرجع استفاده می شود. سپس مارکر مرجع به عنوان یک موقعیت شروع مشخص می شود که می تواند شمارش یا پیگیری موقعیت را از سر بگیرد.
توجه: انکودرهای چرخشی افزایشی به دلیل احتمال تداخل یا سو mis خواندن ، دقیقاً دقیقتر از انکودرهای چرخشی مطلق نیستند.
انکودر مطلق
یک انکودر مطلق شامل اجزایی است که در انکودرهای افزایشی نیز یافت می شوند. آنها یک آشکارساز نوری و منبع نور LED را پیاده سازی می کنند اما به جای دیسک با خطوط به طور مساوی روی دیسک ، یک انکودر مطلق از دیسک با الگوهای دایره متحدالمرکز استفاده می کند.
انکودرهای مطلق چگونه کار می کنند؟
انکودرهای مطلق مانند تصویر زیر از ماسک ثابت بین آشکارساز نوری و دیسک انکودر استفاده می کنند. سیگنال خروجی تولید شده از یک انکودر مطلق در بیت های دیجیتالی است که مربوط به یک موقعیت منحصر به فرد است. پیکربندی بیت توسط نوری که هنگام چرخش دیسک توسط دستگاه آشکارساز نوری دریافت می شود ، تولید می شود. پیکربندی نور دریافت شده به کد خاکستری ترجمه می شود. در نتیجه ، هر موقعیت پیکربندی بیت منحصر به فرد خود را دارد.
اجزای انکودر مطلق
انکودر خطی
انکودر خطی یک سنسور ، مبدل یا خوانش متصل به مقیاسی است که موقعیت را انکودری می کند. سنسور مقیاس را می خواند و موقعیت را به سیگنال آنالوگ یا دیجیتال تبدیل می کند که به بازخوانی دیجیتالی تبدیل می شود. حرکت از تغییر موقعیت با زمان تعیین می شود. هر دو نوع انکودر خطی نوری و مغناطیسی با استفاده از این نوع روش کار می کنند. با این حال ، این ویژگی های فیزیکی آنها است که آنها را متفاوت می کند.
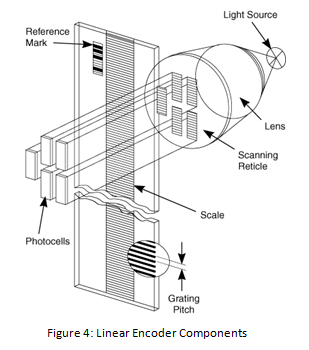
انکودرهای خطی نوری چگونه کار می کنند؟
منبع نور و لنز یک پرتو نور موازی تولید می کنند که از چهار پنجره شبکه اسکن عبور می کند. چهار پنجره اسکن شده با فاصله 90 درجه از یکدیگر تغییر مکان داده اند. سپس نور از مقیاس شیشه عبور کرده و توسط حسگرهای نور تشخیص داده می شود. سپس مقیاس هنگامی که واحد اسکن حرکت می کند ، پرتو نور شناسایی شده را تغییر می دهد. تشخیص نور توسط حسگر نور ، خروجی های موج سینوسی تولید می کند. سپس سیستم انکودر خطی با ترکیب سیگنالهای جابجا شده دو خروجی سینوسی ایجاد می کند که متقارن هستند اما از فاز 90 درجه خارج از فاز هستند. یک سیگنال مرجع
هنگامی ایجاد می شود که الگوی پنجم در شبکه اسکن با الگوی یکسان در مقیاس همسو شود.
اجزای انکودر خطی
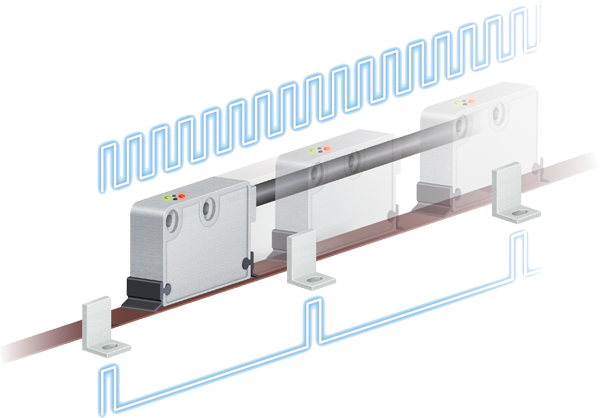
انکودر خطی چگونه کار می کند؟
یک سیستم Linear Encoder با استفاده از یک هد خواندنی سنسور مغناطیسی و یک مقیاس مغناطیسی برای تولید TTL یا خروجی آنالوگ برای کانال A و B. با عبور سنسور مغناطیسی از کنار مقیاس مغناطیسی ، سنسور تغییر میدان مغناطیسی را تشخیص می دهد و یک سیگنال از آن خارج می شود. این فرکانس سیگنال خروجی متناسب با سرعت اندازه گیری و جابجایی سنسور است. از آنجا که یک انکودر خطی تغییر در میدان مغناطیسی را تشخیص می دهد ، تداخل نور ، روغن ، گرد و غبار و بقایا تأثیری بر این نوع سیستم ندارد. بنابراین در محیط های سخت قابلیت اطمینان بالایی دارند.
انکودر خطی-متحرک
انکودر روتاری مغناطیسی
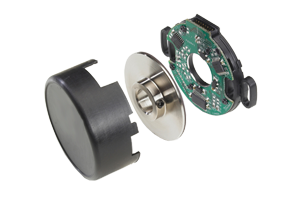
انکودر مغناطیسی M15
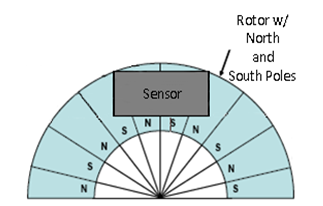
انکودر مغناطیسی از دو قسمت تشکیل شده است: روتور و حسگر. روتور با شافت می چرخد و در اطراف محیط خود دارای قطب های متناوب با شمال و جنوب است. سنسور این تغییرات کوچک را در موقعیت N >> S و S >> N تشخیص می دهد. روشهای زیادی برای تشخیص تغییرات میدان مغناطیسی وجود دارد ، اما دو نوع اصلی مورد استفاده در انکودرها عبارتند از: Hall Effect و Magneto resistive. سنسورهای اثر هال با تشخیص تغییر ولتاژ توسط انحراف مغناطیسی الکترون ها کار می کنند. حسگرهای مقاومتی مگنتو تغییر مقاومت ناشی از میدان مغناطیسی را تشخیص می دهند.
روتور با قطب شمال و جنوب
سنجش اثر هال
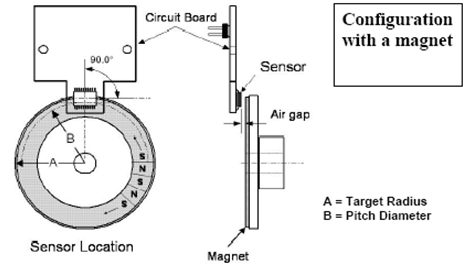
سنسور سیگنالهای Hall-Effect را تولید كرده و پردازش می كند و سیگنال درجه چهار را تولید می كند ، همانطور كه در انکودران نوری معمول است. خروجی با اندازه گیری توزیع شار مغناطیسی در سطح تراشه تولید می شود. دقت خروجی با توجه به آهنربا هدف به محل قرارگیری شعاعی IC بستگی دارد. صورت تراشه باید موازی آهنربا باشد بنابراین شکاف آهنربا به حسگر در سطح حسگر سازگار است.
انکودران مغناطیسی از سه آسیب پذیری که انکودران نوری با آن روبرو هستند جلوگیری می کنند:
• خرابی های مهر و موم که اجازه ورود آلاینده ها را می دهد
• ممکن است دیسک نوری در هنگام لرزش یا ضربه خرد شود
• خرابی های تحمل
دستگاه های مغناطیسی طراحی شده به طور موثر دو حالت خرابی اول را از بین می برند و فرصتی را برای کاهش خرابی های بلبرینگ نیز فراهم می کنند. انکودرهای مغناطیسی به دلیل آلودگی خطایی ایجاد نمی كنند زیرا حسگرهای آنها تفاوت در میدان های مغناطیسی جاسازی شده در روتور و روغن را تشخیص می دهند ، خاک و آب بر این میدان های مغناطیسی تأثیر نمی گذارد.
پیکربندی با آهنربا
سنسورهای Hall-Effect معمولاً هزینه کمتری دارند و از دقت کمتری نسبت به سنسورهای مقاومت مغناطیسی برخوردار هستند. این به این معنی است که سنسورهای Hall-Effect ، هنگامی که در انکودر استفاده می شوند ، “jitter” یا خطای بیشتری در سیگنال ناشی از تغییرات سنسور ایجاد می کنند.
انکودر ENC EC35
انکودرهای تخفیف
انکودر کموتاسیون همان اجزای اساسی انکودرهای افزایشی را دارد اما با اضافه شدن مسیرهای تخلیه در کنار لبه خارجی دیسک برای خروجی U / V / W.
انکودرهای کموتاسیون چگونه کار می کنند؟
انکودران کموتاسیون از دیسک شفافی استفاده می کنند که شامل بخشهای مات است که برای تعیین حرکت از یکدیگر فاصله دارند. از دیود ساطع کننده نور برای عبور از دیسک شیشه استفاده می شود و توسط ردیاب عکس شناسایی می شود. این باعث می شود که انکودر هنگام چرخش قطاری از پالس هایی با فاصله یکسان ایجاد کند. خروجی انکودرهای چرخشی افزایشی با پالس در دور اندازه گیری می شود که برای پیگیری موقعیت یا تعیین سرعت استفاده می شود.
قسمت بیرونی دیسک انکودر شامل مسیرهای تخلیه است که اطلاعاتی را در مورد موقعیت دقیق قطب های موتور به یک کنترل کننده ارائه می دهد ، بنابراین ورودی کنترل کننده مناسب می تواند به موتور عرضه شود. مسیرهای جابجایی انکودر موقعیت موتور را خوانده و به کنترل کننده می آموزد که چگونه جریان کارآمد و مناسب موتور را ایجاد کند تا باعث چرخش شود. خروجی تخفیف برای U / V / W می تواند به صورت خروجی دیفرانسیل یا جمع کننده باز (وابسته به سازنده) باشد.
چگونه انکودرها کنترل می شوند؟
انکودران از طریق چرخشی که روی آن سوار شده است کنترل می شوند. شافت با توپی که در داخل انکودر است تماس می گیرد. با چرخش شافت ، چرخش دیسک با خطوط شفاف و جامد در مدار مدار انکودر انجام می شود. مدارهای انکودر حاوی یک LED است که توسط یک دیود فوتوالکتریک گرفته شده و پالس هایی را به کاربر منتقل می کند. سرعت چرخش دیسک به سرعت شفتی که انکودر به آن متصل است بستگی خواهد داشت. خطوط انکودر نوری و مغناطیسی آناهیم اتوماسیون از یک منبع تغذیه + 5VDC تغذیه می شوند و قادر به غرق شدن و تأمین منبع 8mA هستند.
مشخصات فیزیکی
انکودرهای خطی
اجزای اصلی انکودر خطی یک واحد اسکن ، سنسور ، مبدل یا هد خواندنی است که با مقیاس انتقالی یا بازتابنده جفت می شود که موقعیت را کد می کند. مقیاس یک انکودر خطی به طور کلی از شیشه ساخته شده و بر روی یک تکیه گاه سوار می شود و واحد اسکن شامل یک منبع نور ، سلول های نوری و یک قطعه شیشه ای دوم به نام شبکه اسکن است.
بنابراین ، انکودر خطی قادر است حرکت را به سیگنال های دیجیتال یا آنالوگ تبدیل کند تا تغییر موقعیت را با گذشت زمان تعیین کند.
انکودرهای دوار
اجزای اصلی انکودر چرخشی دیسک ، منابع نور و آشکارسازها و الکترونیک است. دیسک شامل یک الگوی منحصر به فرد از دایره های اچ متحدالمرکز است و به طور متناوب بین بخش های مات و شفاف قرار دارد. این الگو پیکربندی های بیتی منحصر به فردی را ارائه می دهد و برای اختصاص موقعیت های خاص استفاده می شود. برای هر حلقه متحدالمرکز در یک انکودر چرخشی ، یک منبع نور و یک ردیاب نور وجود دارد که خطوط حک شده روی دیسک را شناسایی می کند. وسایل الکترونیکی متشکل از یک دستگاه خروجی است که سیگنال بدست آمده از سنسور (منبع نور / آشکارساز) را برای تأمین بازخورد موقعیت و / یا سرعت می گیرد. همه این اجزا در یک واحد مسکونی محصور شده اند.
دیسک انکودر مطلق با الگوی دایره متحدالمرکز
انکودرهای افزایشی
دیفرانسیل – در داخل
نسخه فلش 9،0 یا بالاتر مورد نیاز است
شما هیچ افزونه فلش نصب ندارید
برای بارگیری آخرین نسخه اینجا را کلیک کنید
انکودر از نوع دیفرانسیل
اجزای اصلی انکودر افزایشی دیسک شیشه ، LED (دیود ساطع کننده نور) و آشکارساز عکس است. دیسک شفاف شامل بخشهای مات است که برای منحرف کردن نور در یک فاصله قرار دارند در حالی که بخشهای شفاف اجازه عبور نور را می دهند که در شکل 2 نشان داده شده است. انکودر نوری از دیود ساطع کننده نور استفاده می کند که نور را از طریق قسمتهای شفاف دیسک تابانده است. نوری که از طریق آن می تابد توسط آشکارساز عکس که یک خروجی سیگنال الکتریکی تولید می کند دریافت می شود.
اجزای انکودر نوری
انکودرها در کجا استفاده می شوند؟
انکودرها برای بسیاری از برنامه های کاربردی که به اطلاعات بازخورد نیاز دارند ، به یک منبع حیاتی تبدیل شده اند. خواه یک برنامه کاربردی مربوط به سرعت ، جهت و یا مسافت باشد ، قابلیت انکودری گسترده به کاربران امکان می دهد تا از این اطلاعات برای کنترل دقیق استفاده کنند. با ظهور رزولوشن های بالاتر ، ناهمواری ها و هزینه های کمتر ، انکودران به فناوری ترجیحی در مناطق بیشتر تبدیل شده اند. امروز ، برنامه های انکودر در اطراف ما هستند. از آنها در چاپگرها ، اتوماسیون ، اسکنرهای پزشکی و تجهیزات علمی استفاده می شود.
خط تولید انکودر مقرون به صرفه Anaheim Automation یک انتخاب عاقلانه برای برنامه هایی است که نیاز به کنترل بازخورد دارند. مشتریان آناهیم اتوماسیون برای خط تولید انکودر متنوع هستند: شرکت های صنعتی در حال کار یا طراحی ماشین آلات خودکار شامل پردازش مواد غذایی ، برچسب گذاری ، برنامه های کاربردی کوتاه ، نوار نقاله ، حمل و نقل مواد ، رباتیک ، تشخیص پزشکی و ماشین آلات CNC هستند.
از انکودرها در بسیاری از صنایع استفاده می شود
انکودرها به عنصری اساسی برای کاربردها در صنایع مختلف تبدیل شده اند. در زیر لیستی جزئی از صنایع استفاده شده از انکودر وجود دارد:
• خودرو – صنعت خودرو از انکودرها استفاده می کند زیرا ممکن است حسگرهای حرکت مکانیکی برای کنترل سرعت استفاده شوند.
• لوازم الکترونیکی مصرفی و تجهیزات اداری – در صنعت الکترونیک مصرفی ، انکودرها به طور گسترده ای از تجهیزات اداری مانند تجهیزات اسکن ، چاپگرها و اسکنرهای مبتنی بر رایانه استفاده می کنند.
• صنعتی – در صنعت صنعتی ، از انکودرها در ماشین های برچسب گذاری ، بسته بندی و ابزارآلات با کنترل کننده های موتور یک و چند محور استفاده می شود. انکودرها را می توان در کنترل دستگاه CNC نیز یافت.
• پزشکی – در صنعت پزشکی ، انکودرها در اسکنرهای پزشکی ، کنترل حرکت میکروسکوپی یا نانوسکوپی دستگاه های خودکار و پمپ های توزیع استفاده می شوند.
• نظامی – ارتش همچنین از انکودرها در استفاده از آنتن های موقعیت یابی استفاده می کند.
• Instruments علمی – تجهیزات علمی انکودرها را در موقعیت یابی تلسکوپ رصدی پیاده سازی می کنند.
برنامه های کاربردی برای انکودرها
انکودر می تواند در برنامه هایی که نیاز به بازخورد موقعیت ، سرعت ، مسافت و غیره دارند استفاده شود. مثالهای ذکر شده در زیر توانایی ها و پیاده سازی های گسترده یک انکودر را نشان می دهد:
• رباتیک
• دستگاه های برچسب زدن
• تجهیزات پزشکی
• منسوجات
• ماشین آلات حفاری
• بازخورد موتور
• ماشین های مونتاژ
• بسته بندی
• سیستم های نشانگر X و Y
• چاپگرها
• ماشین آلات آزمایش
• دستگاه های CNC
نحوه انتخاب انکودر
چندین معیار مهم در انتخاب انکودر مناسب وجود دارد:
1. خروجی
2. وضوح مورد نظر (CPR)
3. سر و صدا و طول کابل
4. کانال شاخص
5. پوشش / پایه
خروجی
خروجی به آنچه توسط برنامه مورد نیاز است بستگی دارد. دو فرم خروجی وجود دارد که افزایشی و مطلق هستند. فرم های خروجی افزایشی به صورت خروجی های موج مربعی شکل می گیرند. برای برنامه ای که به انکودر افزایشی نیاز دارد ، سیگنال خروجی یا صفر است یا ولتاژ تغذیه. خروجی انکودر افزایشی به دلیل تغییر مقدار سیگنال زیاد (مقدار ولتاژ ورودی) و کم (صفر) همیشه یک موج مربع است. انکودران مطلق به همان روش انکودرهای افزایشی عمل می کنند ، اما روش های خروجی متفاوتی دارند. وضوح یک انکودر مطلق در بیت ها توصیف شده است. خروجی انکودران مطلق نسبت به موقعیت آن در شکلی از یک کلمه دیجیتالی است. به جای
جریان مداوم پالس ها که توسط انکودرهای افزایشی دیده می شود ، انکودران مطلق یک کلمه منحصر به فرد برای هر موقعیت به صورت بیت تولید می کنند. معادل 1024 پالس در هر دور ، یک انکودر مطلق دارای 10 بیت (210 = 1024) توصیف شده است.
وضوح دلخواه (CPR)
وضوح انکودرهای افزایشی اغلب بر حسب چرخه در دور (CPR) توصیف می شود. چرخه در هر دور تعداد پالس های خروجی در هر دور کامل دیسک انکودر است. به عنوان مثال ، یک انکودر با رزولوشن 1000 به این معنی است که در هر دور کامل انکودر ، 1000 پالس تولید می شود.
سر و صدا و طول کابل
هنگام انتخاب انکودر مناسب برای هر برنامه ، کاربر باید نویز و طول کابل را نیز در نظر بگیرد. طول کابل بیشتر در معرض سر و صدا است. برای اطمینان از عملکرد صحیح سیستم ، استفاده از طول مناسب کابل بسیار مهم است. توصیه می شود از کابلهای محافظ و جفت پیچ خورده با مقدار خازنی ترجیحاً کم استفاده کنید. درجه بندی برای مقدار ظرفیت به طور معمول در ظرفیت در هر فوت است. اهمیت این درجه بندی برای خروجی های پالس موج مربع کاملاً مشخص از انکودر است نه “دندانه دار” یا “دندانه اره” مانند پالس ها به دلیل تداخل صدا.
کانال فهرست
کانال شاخص یک کانال خروجی اختیاری است که پالس خروجی یک بار در هر دور را فراهم می کند. این پالس به کاربر امکان می دهد موقعیت را ردیابی کند و یک نقطه مرجع ایجاد می کند. این کانال خروجی برای انکودرهای افزایشی در هنگام قطع برق بسیار ارزشمند است. در مواردی که قطعی برق وجود دارد ، آخرین کانال شاخص پایدار می تواند به عنوان یک نشانگر مرجع برای یک نقطه شروع مجدد استفاده شود. بنابراین ، وقتی چنین اتفاقی رخ می دهد ، یک کانال شاخص می تواند در برنامه های کاربردی با استفاده از انکودرهای افزایشی کاملاً ارزشمند باشد. انکودران مطلق مشکلی در از دست دادن ردیابی موقعیت در شرایط از دست دادن برق ندارند ، زیرا به هر موقعیت یک پیکربندی بیت منحصر به فرد اختصاص داده شده است.
پوشش / پایه
گزینه های پوشش و پایه ملاحظات مورد نیاز خاص برنامه هستند. گزینه های پوشش بسته به محافظت از انکودر در برابر ذرات گرد و غبار کمک می کند. گزینه های پایه در محیط های لرزشی بزرگ نقش بسزایی دارند. این گزینه های نصب چسب های انتقال دهنده ای هستند که مستقیماً در پشت انکودر به سطح نصب می چسبند ، گوشهای قالب ریزی شده برای نصب مستقیم. اتوماسیون آناهیم همچنین گزینه های پایه مختلفی را برای اهداف نصب ارائه می دهد.
آناهیم اتوماسیون مجموعه ای از گزینه های اصلی و اصلی را برای پاسخگویی به نیازهای برنامه شما ارائه می دهد.
گزینه های جلد:
پوشش بسته قطر سوراخ
گزینه الکترونیکی: جلد بسته H-Option: قطر سوراخ
گزینه های پایه:
هر پنج قطر سوراخ .125 می شود تراز اضافه می کند
3-گزینه: هر پنج قطر سوراخ .125 می شوند. A-Option: شانه تراز را اضافه می کند
چسب آداپتور پلاستیکی قالب Earsslot
G-Option: Molds Ears R-Option: 3-slot Adapter Plate T-Option: چسب انتقال
نحوه نصب انکودر
پس از انتخاب موتور مناسب ، مهم است که بدانید چگونه آن را به درستی نصب کنید. نصب هر انکودر بستگی به نصب یا گزینه پایه آن دارد. اگر قرار است یک انکودر بر روی شافت موتور نصب شود ، می توان از یک ابزار مرکز دهی برای ایجاد سوراخ انکودر به شافت استفاده کرد. گزینه های مختلف نصب دارای ویژگی های مختلفی هستند. یک گزینه R امکان پخش حرکت +/- 15 درجه را فراهم می کند که در آن انکودر می تواند به جلو و عقب بچرخد. با این وجود T-Option از چسب برای چسبیدن به پشت موتور استفاده می کند.
برای راهنمایی گام به گام در مورد نصب انکودر اتوماسیون آناهیم ، آموزشهای ویدئویی ما را اینجا ببینید. Anaheim Automation همچنین گزینه Adder انکودر را فراهم می کند ، جایی که ما انکودر را برای شما سوار می کنیم ، بدون دردسر!
مزایای انکودر
- بسیار قابل اعتماد و دقیق
- بازخورد کم هزینه
- کیفیت بالا
- الکترونیک یکپارچه
- فن آوری نوری و دیجیتال را فیوز می کند
- می تواند در برنامه های موجود گنجانده شود
- اندازه جمع و جور
معایب انکودر
- در معرض تداخل مغناطیسی یا رادیویی (انکودرهای مغناطیسی)
- تداخل مستقیم منبع نور (انکودرهای نوری)
- در معرض آلودگی های خاک ، روغن و گرد و غبار است
عیب یابی
لطفاً توجه داشته باشید: مساعدت فنی در مورد خط انکودر آن و همچنین کلیه محصولات تولیدی یا توزیع شده توسط آناهیم اتوماسیون ، بدون پرداخت هزینه در دسترس است. این کمک برای کمک به مشتری در انتخاب محصولات اتوماسیون آناهیم برای یک کاربرد خاص ارائه می شود. با این حال ، هرگونه انتخاب ، نقل قول یا پیشنهاد برنامه برای انکودر یا هر محصول دیگری که از کارکنان اتوماسیون آناهیم ، نمایندگان یا توزیع کنندگان آن ارائه می شود ، فقط برای کمک به مشتری است. در همه موارد ، تعیین تناسب اندام انکودر سفارشی در طراحی سیستم خاص فقط به عهده مشتریان است. در حالی که تمام تلاش برای ارائه مشاوره محکم در مورد خط تولید Encoder و همچنین سایر محصولات کنترل حرکت و تهیه اطلاعات فنی و تصاویر به طور دقیق انجام می شود ، این توصیه ها و اسناد برای
فقط مرجع ، و بدون تغییر می تواند تغییر کند.
مشکل: خروجی وجود ندارد
راه حل: هیچ خروجی ممکن است نتیجه عوامل مختلفی باشد. برای اطمینان از عملکرد مناسب انکودر می توان گام هایی را برداشت. هیچ حرکت مکانیکی منجر به خروج سیگنال از انکودر نمی شود. برای اصلاح این مسئله ، اگر انکودر در حال چرخش است ، مشاهده کنید. تأیید کنید که همه رشته های بین انکودر و درایور / کنترل کننده صحیح بوده و از ولتاژ مناسب استفاده شده است. داشتن اتصالات شل یا ولتاژ نامناسب ممکن است اجازه ندهد که انکودر به درستی کار کند. در آخر ، اطمینان حاصل کنید که از نوع صحیح سیگنال (به عنوان مثال جمع کننده باز ، کشش ، راننده خط یا فشار دادن) برای برنامه شما استفاده می شود. اگر مشکل همچنان ادامه داشت ، در صورت امکان انکودران را عوض کنید تا مشخص شود مشکل انکودر است.
مشکل: یافتن پالس شاخص امکان پذیر نیست
راه حل: پالس شاخص یا نشانگر مرجع ، خروجی یک بار در هر دور از یک انکودر است و بهتر است با استفاده از اسیلوسکوپ پیدا شود. بررسی کنید که سیم کشی بین انکودر و درایور / کنترل کننده صحیح بوده و از ولتاژ مناسب استفاده شده است. اگر این مسئله مشکلی را حل نکرد ، سعی کنید RPM موتور را پایین بیاورید ، زیرا ممکن است راننده / کنترل کننده نتواند پالس شاخص را در مقادیر دور بسیار بالا شناسایی کند.
مشکل: تعداد خروجی نشان دهنده جهت نادرست است
راه حل: اگر خروجی شمارش جهت نادرستی را نشان می دهد ، پیکربندی سیم را بررسی کنید. ببینید سیم ها معکوس شده اند یا خیر. اگر معکوس شدند ، سیم ها را به راحتی عوض کنید.
توجه: اگر برنامه شما از فهرست استفاده می کند ، معکوس کردن پیکربندی سیم باعث می شود که تراز مرجع نیز تغییر کند. در این صورت ، لطفاً تغییرات مناسب را در برنامه خود ایجاد کنید.
مشکل: انکودر چرخش ندارد
راه حل: وقتی انکودرها در محیط های باز قرار بگیرند ، ممکن است گرد و غبار و ذرات باقی مانده در اطراف شافت جمع شوند. ناحیه در معرض را تمیز کنید و اطمینان حاصل کنید که اجسامی وجود ندارد که مانع چرخش انکودر شود.
مشکل: تداخل صدا
راه حل: برای بهبود ایمنی نویز انکودرها اکیداً توصیه می شود که هیچ تجهیزات الکتریکی دیگری در این نزدیکی نباشد و یا در فاصله مناسب نگهداری نشود. کابل های انکودر نیز باید محافظت شوند و سیم های مناسب باید زمین باشند تا صدای الکتریکی به حداقل برسد.
مشکل: خروجی تحریف شده یا نادرست
راه حل: خروجی مخدوش یا نادرست می تواند هر ترکیبی از اتصالات سیم کشی شل ، خروجی انکودر با راننده / کنترل کننده سازگار نباشد ، نویز الکتریکی یا ترازبندی نامناسب. برای حل این مشکل اتصالات سیم ، مشکلات سازگاری با انکودر و راننده / کنترل کننده ، تراز بودن انکودر و شافت را بررسی کنید.
فرمول ها
رابطه بین فرکانس انکودر CPR و سرعت موتور (RPM) با معادله زیر آورده شده است:
f = (چرخه / دور) * (دور / ثانیه) / 1000 = کیلوهرتز
RPM = دور در دقیقه
CPR = چرخه در هر دور
تبدیل مسافت:
(PPR) / (شعاع شافت 2 * pi *) = پالس در اینچ
(نبض در اینچ) ^ – 1 = اینچ در هر نبض
واژه نامه
Absolute Encoder – موقعیت شافت را با کمی پیکربندی فراهم می کند و قادر است موقعیت مطلق را حتی پس از اتلاف یا خرابی برق حفظ و یا فراهم کند.
دقت – تفاوت در فاصله بین موقعیت نظری و واقعی.
چرخه در دور (CPR) – چرخه در هر دور تعداد پالس های خروجی در هر دور کامل دیسک انکودر است
انکودر – یک سنسور حرکت مکانیکی است که سیگنال های دیجیتالی را در پاسخ به حرکت تولید می کند.
Encoder افزایشی – دستگاهی که قطار پالس های ناشی از پاسخ به حرکت مکانیکی را فراهم می کند. خروجی این انکودر به شکل یک موج مربع است.
شاخص – یک کانال خروجی جداگانه که در هر دور شفت یک پالس واحد را فراهم می کند. می تواند برای ایجاد یک مرجع یا نشانگر برای موقعیت شروع استفاده شود.
درون یابی – روشی برای افزایش وضوح یک انکودر است. این روش به انکودر اجازه می دهد بدون افزایش اندازه کلی دیسک و انکودر ، با وضوح بالاتر خروجی تولید کند.
Line Driver – یک خروجی منبع است. این به این معنی است که وقتی در حالت ‘ON است ، درایور خط Vcc را تأمین می کند و در حالت‘ خاموش ، راننده شناور می شود. برای برنامه های درایور خط ، ورودی غرق شدن لازم است.
Open Collector – یک خروجی در حال غرق شدن است. در حالت OFF ، یک جمع کننده باز زمین خواهد شد و در حالت “ON” ، جمع کننده باز شناور خواهد شد. برای برنامه های جمع کننده باز ، ورودی منبع لازم است.
Pulses Per Revolution (PPR) – تعداد کل پالس های تولید شده در هر دور کامل شافت انکودر.
Push-pull – ترکیبی است بین یک راننده خط و یک جمع کننده باز. در حالت “خاموش” زمین خواهد شد و در حالت “روشن” Vcc را تأمین می کند.
Quadrature Encoder – دو کانال خروجی که با 90 درجه الکتریکی از فاز خارج می شوند. از اختلاف فاز ، جهت چرخش را نیز می توان تعیین کرد.
وضوح – تعداد خطوط افزایش یافته روی دیسک. وضوح برای انکودرهای افزایشی غالباً به عنوان چرخه در هر رزولوشن و برای انکودران مطلق از نظر بیت شناخته می شود.
انکودر تک کانال – فقط o دارد
ne کانال خروجی و در برنامه های کاربردی سرعت استفاده می شود.
Squarewave – شکل موج تکراری مربوط به سیگنال های بالا و پایین.
مسابقه انکودر
1- انکودرهای افزایشی کانال تک خروجی برای چه مواردی استفاده می شود؟
A. جهت گیری حس
B. سرعت حس (دور سنج)
C. بازخورد موقعیت
- کدامیک از موارد زیر تفاوت NOT بین انکودر مطلق و انکودر افزایشی دارد؟
A. انکودران مطلق موقعیت منحصر به فردی را ایجاد می کنند.
ب. مطلق از حلقه های متحدالمرکز بر روی یک دیسک شفاف استفاده می کنید در حالی که انکودران افزایشی از بخش های مات با فاصله یکسان برای تعیین حرکت استفاده می کنند.
ج – هر دو انکودر مطلق و انکودر افزایشی به دلیل از دست دادن / قطع برق موقعیت خود را از دست می دهند.
3- کدام یک از موارد زیر برای کانال شاخص اعمال می شود؟
A. ردیاب موقعیت
ب. مرجع / نقطه خانه
ج. تعیین فاصله
D. همه موارد بالا
4- انکودر چه کاری انجام می دهد؟
الف – حرکت مکانیکی را حس می کند.
ب- اطلاعات مربوط به موقعیت ، سرعت و جهت را ارائه می دهد.
ج- آنالوگ را به اطلاعات دیجیتالی تبدیل می کند.
د – هیچ یک از موارد فوق
E. همه موارد فوق.
- CPR مخفف چیست؟
الف. چرخه ها در هر انقلاب
ب – در هر انقلاب حساب می کند
ج – هم A و هم B
د – هیچ یک از موارد فوق
- انواع مختلف خروجی انکودر را در زیر شرح دهید.
TTL – مدارهای دروازه منطقی هستند که برای ورود و خروج دو نوع حالت سیگنال طراحی شده اند: بالا (1) و کم (0). انتقال بین سیگنال های بالا و پایین ، خروجی های مربع TTL را تولید می کند.
Open Collector – یک خروجی در حال غرق شدن است. در حالت OFF ، یک جمع کننده باز زمین خواهد شد و در حالت “ON” ، جمع کننده باز شناور خواهد شد. برای برنامه های جمع کننده باز ، ورودی منبع لازم است.
Line Driver – یک خروجی منبع است. این به این معنی است که وقتی در حالت ‘ON است ، درایور خط Vcc را تأمین می کند و در حالت‘ خاموش ، راننده شناور می شود. برای برنامه های درایور خط ، ورودی غرق شدن لازم است.
Push-Pull – ترکیبی بین یک درایور خط و یک جمع کننده باز است. در حالت “خاموش” زمین خواهد شد و در حالت “روشن” Vcc را تأمین می کند.
7-کدام یک از مزایای انکودر است؟
A. هزینه کم
ب- وضوح بالا
پ. قابلیت اطمینان و دقت بالا
D. اندازه جمع و جور
E. تلفیق بین فناوری نوری و دیجیتال
و. همه موارد بالا
8- کانالهای کوادراتور با چند درجه الکتریکی خارج از فاز هستند؟
A. 45
ب 120
C. 60
D. 90
- معیارهای انتخاب انکودر را لیست کنید:
- خروجی
- وضوح مورد نظر (CPR)
- سر و صدا و طول کابل
- کانال شاخص
- پوشش / پایه
- محاسبه: اگر یک انکودر دارای رزولوشن 1024 باشد و روی شاخه ای با قطر 1 “سوار شود ، پالس های اینچ و اینچ هر پالس با این ترکیب چقدر خواهد بود؟
(1024 * 4) / (2 * pi * .5) = 1303.79 پالس در اینچ
(1303) ^ – 1 = .000767 اینچ در هر پالس
سوالات متداول انکودر
س: انکودر چیست؟
پاسخ: انکودر حسگر حرکت مکانیکی است که سیگنال های دیجیتالی را در پاسخ به حرکت تولید می کند.
س: چگونه انکودر را نصب می کنید؟
پاسخ: برای آموزش گام به گام نحوه نصب انکودران اتوماسیون آناهیم ، اینجا را کلیک کنید.
س: تفاوت بین انکودران مطلق و افزایشی چیست؟
پاسخ: انکودرهای مطلق و افزایشی از دو جهت متفاوت هستند:
– هر موقعیت یک انکودر مطلق منحصر به فرد است
– یک انکودر مطلق به دلیل از دست دادن یا قطع برق هرگز موقعیت خود را از دست نمی دهد. انکودران افزایشی با از دست دادن یا قطع شدن برق ، موقعیت خود را از دست می دهند
س: کانال چیست؟
پاسخ: کانال یک سیگنال خروجی الکتریکی از یک انکودر است.
س: کوادادور چیست؟
پاسخ: کوادراتور دارای دو کانال خروجی است که با تکرار موج های مربع شکل ، 90 درجه الکتریکی از فاز خارج می شوند. از اختلاف فاز ، جهت چرخش را نیز می توان تعیین کرد.
دو موج مربع در کوادتر
س: نبض شاخص چیست؟
الف: پالس شاخص که به آن پالس مرجع یا مارکر نیز گفته می شود ، یک پالس خروجی منفرد است که یک بار در دور تولید می شود.
س: انواع دیگری از فناوری انکودر وجود دارد؟
پاسخ: دو نوع فناوری انکودر وجود دارد.
– نوری: در این نوع فناوری از نوری که از طریق شکافهای موجود در دیسک فلزی / شیشه ای به یک فوتودیود تابیده می شود ، استفاده می شود.
– مغناطیسی: نوارهای مواد مغناطیسی شده روی دیسک های چرخان قرار می گیرند و توسط سنسورهای Hall-Effect یا حسگرهای مقاومت مغناطیسی حس می شوند.
س: انکودرها در چه نوع برنامه هایی اجرا می شوند؟
پاسخ: آنها اغلب در موتورهای پله ای ، اتوماسیون ، رباتیک ، دستگاه های پزشکی ، کنترل حرکت و بسیاری از برنامه های دیگر که به بازخورد موقعیت نیاز دارند استفاده می شوند.
س: آیا دیسک انکودر (چرخ رمز) با هر ماژول انکودر کار می کند؟
پاسخ: خیر ، هر رزولوشن و هر قطر دیسک با یک ماژول انکودر متفاوت کار می کند.
س: PPR چیست؟
پاسخ: PPR مخفف پالس در دور در حرکت دورانی برای حرکت چرخشی و پالس در اینچ یا میلی متر برای حرکت خطی است.
س: چه زمانی می توان از یک کانال خروجی منفرد در یک انکودر افزایشی استفاده کرد؟
پاسخ: هنگامی که اهمیت جهت دهی مهم نباشد می توان از یک کانال خروجی منفرد برای انکودر افزایشی استفاده کرد. چنین کاربردهایی از دور سنج استفاده می کنند.
س: آیا Anaheim Automation یک انکودر برای موتورها نصب می کند؟
پاسخ: بله ، یک شماره قطعه خاص برای شامل کردن ایجاد می شود
انکودر متصل به موتور.
تعمیر و نگهداری مورد نیاز
انکودرها به دلیل ناهمواری و قابلیت اطمینان ، به تعمیر و نگهداری بسیار کمی نیاز دارند. با این حال ، توصیه می شود حداقل در معرض انكودر در معرض ذرات گرد و غبار یا بقایای آن قرار بگیرید ، مگر اینکه برای قرار گرفتن در معرض آب یا رطوبت طراحی شود. همچنین ، تحت فشار و لرزش ، دیسک های انکودر ممکن است خراشیده شوند که منجر به خرابی انکودر شود. در صورت وقوع چنین رویدادی ، ممکن است نیاز به تعویض دیسک باشد تا قرائت دقیق ارائه شود.
ملاحظات زیست محیطی برای یک انکودر
نکات زیست محیطی و ایمنی زیر باید در تمام مراحل کار ، سرویس و تعمیر انکودر رعایت شود. عدم رعایت این اقدامات احتیاطی ، استانداردهای ایمنی طراحی ، ساخت و استفاده در نظر گرفته شده از انکودر را نقض می کند. لطفاً توجه داشته باشید که حتی با وجود یک انکودر خوش ساخت ، محصولاتی که به طور نامناسب کار و نصب می شوند می توانند خطرناک باشند. احتیاط کاربر باید با توجه به بار و محیط کار رعایت کند. مشتری در نهایت مسئول انتخاب ، نصب و عملکرد صحیح انکودر است.
فضایی که از انکودر استفاده می شود باید منجر به عملکردهای خوب تجهیزات الکتریکی / الکترونیکی شود. انکودر را در حضور گازهای قابل اشتعال ، گرد و غبار ، روغن ، بخار یا رطوبت کار نکنید. برای استفاده در فضای باز ، انکودر باید در برابر عناصر با پوشش کافی محافظت شود ، در حالی که جریان هوا و خنک سازی کافی را فراهم می کند. رطوبت ممکن است باعث ایجاد خطر شوک الکتریکی و یا خرابی سیستم شود. باید از اجتناب از هر نوع مایعات و بخارها توجه لازم به عمل آید. اگر برنامه شما به رتبه بندی خاص IP نیاز دارد با کارخانه تماس بگیرید. نصب انکودر در محیطی عاری از تراکم ، گرد و غبار ، سر و صدای الکتریکی ، لرزش و ضربه عاقلانه است.
علاوه بر این ، کار با انکودر در یک محیط غیر استاتیک و محافظ ترجیح داده می شود. مدارهای در معرض دید باید همیشه به درستی محافظت و یا محصور شوند تا از تماس غیرمجاز انسان با مدارهای مستقیم جلوگیری شود. در حین برق کار نباید انجام شود. هنگام روشن بودن کانکتورها را از برق وصل نکنید و از برق نکشید. قبل از انجام کار بازرسی روی انکودر پس از خاموش کردن برق ، حداقل 5 دقیقه صبر کنید ، زیرا حتی پس از خاموش شدن منبع برق ، مقداری انرژی الکتریکی در مدار داخلی مدار انکودر باقی می ماند.
برنامه ریزی نصب انکودر در یک طرح سیستم عاری از آوار ، مانند بقایای فلزات در برش ، حفاری ، ضربه زدن و جوشکاری ، یا هر ماده خارجی دیگری که می تواند در تماس با مدار باشد. عدم جلوگیری از ورود آوار به انکودر می تواند منجر به آسیب و یا شوک شود.
یک عمر انکودر
طول عمر انکودر به عوامل مختلفی از جمله قرار گرفتن در معرض محیط و استفاده از آن بستگی دارد. با محدود کردن قرار گرفتن در معرض انکودر در تجهیزات الکتریکی ، دمای بالاتر از مقادیر توصیه شده ، تراکم و لرزش و ضربه و استفاده از انکودر طبق دستورالعمل سازنده می تواند طول عمر انکودر را افزایش دهد.
تجهیزات جانبی
همراه با خط انکودر ، آناهیم اتوماسیون یک خط جامع از کابل های انکودر تک و دیفرانسیل با چهار ، شش و هشت لید ، طول کابل تا 16 فوت و ابزار انکودری انکودر را حمل می کند. علاوه بر این ، Anaheim Automation مجموعه گسترده ای از موتورهای پله ای ، بدون برس و سروو را ارائه می دهد که می تواند انکودرها را برای نیازهای برنامه شما پیاده سازی کند.
خط کش دیجیتال چیست
خط کش آنالوگ
خط کش دیجیتال فرز
خط کش دیجیتال کره ای
انواع خط کش دیجیتال
خط کش انکودر
خط کش دیجیتال jenix
ساخت خط کش دیجیتال
خط کش دیجیتال چیست
خط کش دیجیتال فرز
خط کش دیجیتال کره ای
خط کش آنالوگ
خط کش انکودر
نمایندگی خط کش دیجیتال sino
انواع خط کش دیجیتال
فروش خط کش دیجیتال اصفهان
خط کش برقی
قیمت خط کش کولیس
قیمت خط کش الکترونیکی
انواع خط کش دیجیتال






دیدگاه بگذارید