انکودر چیست و کجا کاربرد دارد؟
Rotary Encoder يا شفت انکودر (Shaft encoder) يک تجهيز نوري است که یک حرکت مکانیکی (خطی و دورانی) را به سیگنال الکتریکی تبدیل کرده تا بتوان مشخصه های متفاوتی را از آن سیگنال مورد استفاده قرار داد، یا به طور ساده تر انکودرها وسیله ای هستند که حرکت دورانی یا خطی را به سیگنال دیجیتالی ۰ یا ۱ تبدیل می کنند البته نا گفته نماند که بعضی از انکودر ها خروجی آنالوگ (۰ تا ۱۰ ولت و یا ۴ تا ۲۰میلی آمپر) دارند.مهندسان ابزار دقيق و اتوماسيون از اين تجهيز که در حقيقت ترانسديوسر زاويه است در کاربردهای فرآوانی که نياز به اندازه گيری دقيق گردش شافت ميباشد نظير روبوتيک ، دستگاه های CNC ، فيدبک کنترل دور موتور و…
انکودرها تغییرات مکان(Position)و جهت (Direction) را به سیگنال های الکتریکی ترجمه می کنند.در واقع انکودر حسگری هست که به محور چرخ ،چرخدنده و یا موتور وصل می شود و می تواند میزان چرخش را اندازه گیری کند ، با اندازه گیری میزان چرخش می توان جابجایی،سرعت،شتاب یا زاویه چرخشی را تعیین کرد.
تقسیم بندی انواع انکودرها
انواع انکودرها از نظر ساختمان:
1-انکودرهای خطی(Linear)
این نوع انکودر به منظور اندازه گیری حرکت خطی مورد استفاده قرار می گیرد و از لحاظ ساختمانی در انواع نوری ، مغناطیسی و مقاومتی تولید می شوند.انکودر خطی مدل نوری دارای خروجی دیجیتال وانکدر خطی مدل مغناطیسی ومقاومتی دارای خروجی آنالوگ است. این انکودرها در دستگاه هایی مثل دستگاه پرس برای اندازه گیری میزان حرکت طولی پیستون جک ودر غلتکها برای اندازه گیری میزان فاصله طولی بین توپی های غلتک استفاده می شوند.
2-انکودرهای دورانی(Rotary)
انکودر دوار یا شافت انکودر(Shaft Encoder)،در واقع یک تجهیز الکترومکانیکی است که موقعیت یا حرکت زاویه ای یک شافت یا یک محور را به یک کد آنالوگ یا دیجیتال تبدیل می کند.این نوع انکودر به طور معمول از یک با دو جفت LED فرستنده و گیرنده و یک دیسک مدرج(سیاه وسفید یا جای خالی و پر) استفاده می کند.دیسک مدرج(سیاه وسفید یا جای خالی و جای پر)استفاده می کند.دیسک مدرج مابین سنسورهای فرستنده وگیرنده قرار دارد و این مجموعه بر روی محور چرخان دستگاه قرار دارد.
هنگام چرخش شافت دیسک درجه بندی شده به همراه شافت می چرخد و سنسورهای گیرنده و فرستنده ثابت می مانند.در نتیجه سیگنالی که از سمت فرستنده به گیرنده ارسال می شود توسط چرخش دیسک به طور متوالی قطع و وصل می شود به این صورت که ما در خروجی گیرنده یک قطار از پالسهای صفر و یک منطقی داریم .
این پالسها همان کدهایی هستند که انکدر تولید می کند و برای اینکه تبدیل به موقعیت و یا دوران شافت شود به ورودی یک دیکودر داده می شود.هر چه تعداد نقاط سیاه و سفید روی دیسک بیشتر باشد تعداد این صفر و یک های منطقی در یک دوران کامل(360درجه)بیشتر می شود ودر نتیجه دقت اندازه گیری آن افزایش می یابد.
انواع انکودرها از نظر ساختار:
1-نوری(Optical)
انکودرهای نوری دقیق ترین نوع انکودرها هستند.وقتی یک انکودر نوری را انتخاب می کنیم،خیلی مهم است که انکودر مذکور حفاطت های اضافی برای جلوگیری از آلودگی ناشی از گرد وغبار،لرزش(Vibration) و سایر شرایط رایج در محیط های صنعتی را داشته باشد.
2-خازنی(Capasitive)
انکودرهای خازنی نسبت به مدل قبلی در دنیای صنعت تازه وارد محسوب می شوند.انکودرهای خازنی از نظر نیرومندی مانند مدل های مغناطیسی هستند ولی قدرت تفکیک پذیری انکودرهای نوری از انکودرهای خازنی بالاتر است. البته انکودرهای خازنی بدون توجه به نوع تکنولوژی مورد استفاده قابیلیت تشخیص حرکت وتبدیل آن به سیگنا های استاندارد رایج در صنعت را دارا هستند.
3-مغناطیسی(Magnetic)
انکودرهای مغناطیسی با وجود اینکه از انکودرهای نوری مقاوم ترند واغلب در محیط های در معرض آلودگی،بخار،لرزش وسایر تداخل های محیطی استفاده می شوند ولی قدرت تفکیک (resolution)یا دقت انکودرهای نوری بالاتری می باشد.
نواع انکودرها از نظر نوع عملکرد:
1-مطلق(ِAbsolute Encoder)
یکی از ایرادات انکودرهای افزایشی این است که شمارش پالسهای آن در یک میانگیر یا اکسترنال کانتر(Counter External)ذخیره می شود.اگر برق قطع شود و یا به هر حال اختلال پیدا کند شمارش گم خواهد شد زیرا نقطه ی صفر برای دستگاه به هنگام راه اندازی مجدد کم یا تعریف نشده است این بدان معناست که چنانچه قدرت را از یک ماشین الکتریکی با انکودری که دارای چرخاننده الکتریکی است بگیریم دیگر انکودر موقعیت صحیح را نخواهد دانست.برای حل این مشکا از انکودرهای مطلق استفاده می شود و در این صورت ماشین همیشه موقعیت خود را می داند. در انکودر مطلق دیسکی که دارای چندین گروه از قطعات به فرم دایره های متحدالمرکز در مرکز دیسک انکودر چرخشی است استفاده می شود.چنانچه حلقه به سمت محیط دایره برود هر یک از آن ها دارای دو برابر قطعه نسبت به حالت قبل و داخلی تر خود خواهند داشت
اولین حلقه که داخلی ترین حلقه هاست یک قسمت شفاف و یک قسمت تیره خواهد داشت وحلقه سوم از هریک از قطعات 4 قسمت خواهد داشت اگر انکودر دارای 10 حلقه باشد آخرین حلقه یا دورترین آن از مرکز دارای 512 قطعه می باشد چنانچه هر حلقه از انکودر مطلق دارای دو برابر قطعه از حلقه قبلب خود باشد بین شماره ها یک سیستم باینری برقرار می شود.در این نوع انکودر به ازای هر حلقه روی دیسک یک منبع نور و دریافت کننده آن وجود دارد.
2-افزایشی(Incremental)
اگر انکودر فقط دارای یک ردیف پالس باشد نمی تواند به درستی جهت چرخش را نشان دهد و باید دارای پالس دومی نیز باشد که به این منظور باید یک فرستنده و گیرنده نوری دیگر به مجموعه اضافه شود.بنابراین در لحظاتی که نمی توان جهت چرخش شفت را تشخیص داد(در لحظاتی که هر دو پالس یک منطقی ودر لحظاتی صفر منطقی هستند)نیاز به پالس سومی داریم که این پالس بر اثر یک دور چرخش کامل بوجود می آید که به آن پالس فرمان می گویند واز آن برای شمارش تعداد دوران نیز استفاده می شود.ویژگی های اصلی:
● 1000 پالس خروجی
● شفت داخلی با قطر 12 میلی متر
● نصب آسان در فضای کوچک
● چرخش آسان با کمترین نیرو
● تنوع در نوع خروجی
● ولتاژ تغذیه:%5± D 12-24 VDC
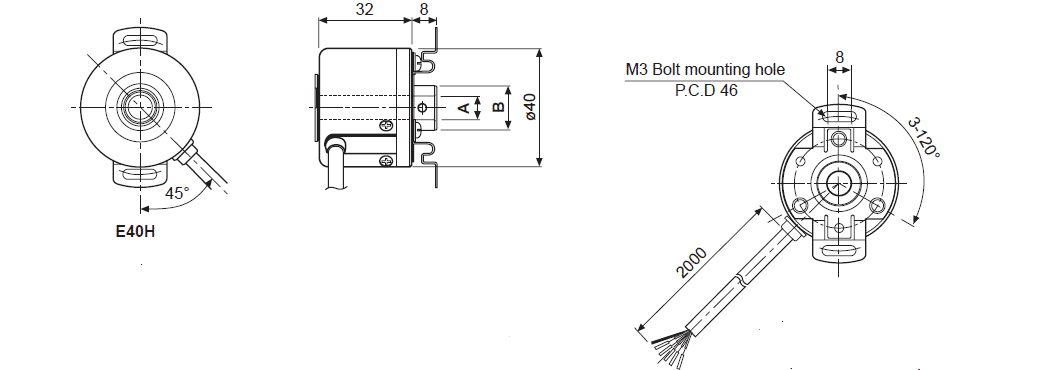
ابعاد انکودر آتونیکس E40H12-1000-3-T-24
انکودر چیست و کجا کاربرد دارد؟
Rotary Encoder يا شفت انکودر (Shaft encoder) يک تجهيز نوري است که یک حرکت مکانیکی (خطی و دورانی) را به سیگنال الکتریکی تبدیل کرده تا بتوان مشخصه های متفاوتی را از آن سیگنال مورد استفاده قرار داد، یا به طور ساده تر انکودرها وسیله ای هستند که حرکت دورانی یا خطی را به سیگنال دیجیتالی ۰ یا ۱ تبدیل می کنند البته نا گفته نماند که بعضی از انکودر ها خروجی آنالوگ (۰ تا ۱۰ ولت و یا ۴ تا ۲۰میلی آمپر) دارند.مهندسان ابزار دقيق و اتوماسيون از اين تجهيز که در حقيقت ترانسديوسر زاويه است در کاربردهای فرآوانی که نياز به اندازه گيری دقيق گردش شافت ميباشد نظير روبوتيک ، دستگاه های CNC ، فيدبک کنترل دور موتور و…
انکودرها تغییرات مکان(Position)و جهت (Direction) را به سیگنال های الکتریکی ترجمه می کنند.در واقع انکودر حسگری هست که به محور چرخ ،چرخدنده و یا موتور وصل می شود و می تواند میزان چرخش را اندازه گیری کند ، با اندازه گیری میزان چرخش می توان جابجایی،سرعت،شتاب یا زاویه چرخشی را تعیین کرد.
تقسیم بندی انواع انکودرها
انواع انکودرها از نظر ساختمان:
1-انکودرهای خطی(Linear)
این نوع انکودر به منظور اندازه گیری حرکت خطی مورد استفاده قرار می گیرد و از لحاظ ساختمانی در انواع نوری ، مغناطیسی و مقاومتی تولید می شوند.انکودر خطی مدل نوری دارای خروجی دیجیتال وانکدر خطی مدل مغناطیسی ومقاومتی دارای خروجی آنالوگ است. این انکودرها در دستگاه هایی مثل دستگاه پرس برای اندازه گیری میزان حرکت طولی پیستون جک ودر غلتکها برای اندازه گیری میزان فاصله طولی بین توپی های غلتک استفاده می شوند.
2-انکودرهای دورانی(Rotary)
انکودر دوار یا شافت انکودر(Shaft Encoder)،در واقع یک تجهیز الکترومکانیکی است که موقعیت یا حرکت زاویه ای یک شافت یا یک محور را به یک کد آنالوگ یا دیجیتال تبدیل می کند.این نوع انکودر به طور معمول از یک با دو جفت LED فرستنده و گیرنده و یک دیسک مدرج(سیاه وسفید یا جای خالی و پر) استفاده می کند.دیسک مدرج(سیاه وسفید یا جای خالی و جای پر)استفاده می کند.دیسک مدرج مابین سنسورهای فرستنده وگیرنده قرار دارد و این مجموعه بر روی محور چرخان دستگاه قرار دارد.
هنگام چرخش شافت دیسک درجه بندی شده به همراه شافت می چرخد و سنسورهای گیرنده و فرستنده ثابت می مانند.در نتیجه سیگنالی که از سمت فرستنده به گیرنده ارسال می شود توسط چرخش دیسک به طور متوالی قطع و وصل می شود به این صورت که ما در خروجی گیرنده یک قطار از پالسهای صفر و یک منطقی داریم .
این پالسها همان کدهایی هستند که انکدر تولید می کند و برای اینکه تبدیل به موقعیت و یا دوران شافت شود به ورودی یک دیکودر داده می شود.هر چه تعداد نقاط سیاه و سفید روی دیسک بیشتر باشد تعداد این صفر و یک های منطقی در یک دوران کامل(360درجه)بیشتر می شود ودر نتیجه دقت اندازه گیری آن افزایش می یابد.
انواع انکودرها از نظر ساختار:
1-نوری(Optical)
انکودرهای نوری دقیق ترین نوع انکودرها هستند.وقتی یک انکودر نوری را انتخاب می کنیم،خیلی مهم است که انکودر مذکور حفاطت های اضافی برای جلوگیری از آلودگی ناشی از گرد وغبار،لرزش(Vibration) و سایر شرایط رایج در محیط های صنعتی را داشته باشد.
2-خازنی(Capasitive)
انکودرهای خازنی نسبت به مدل قبلی در دنیای صنعت تازه وارد محسوب می شوند.انکودرهای خازنی از نظر نیرومندی مانند مدل های مغناطیسی هستند ولی قدرت تفکیک پذیری انکودرهای نوری از انکودرهای خازنی بالاتر است. البته انکودرهای خازنی بدون توجه به نوع تکنولوژی مورد استفاده قابیلیت تشخیص حرکت وتبدیل آن به سیگنا های استاندارد رایج در صنعت را دارا هستند.
3-مغناطیسی(Magnetic)
انکودرهای مغناطیسی با وجود اینکه از انکودرهای نوری مقاوم ترند واغلب در محیط های در معرض آلودگی،بخار،لرزش وسایر تداخل های محیطی استفاده می شوند ولی قدرت تفکیک (resolution)یا دقت انکودرهای نوری بالاتری می باشد.
نواع انکودرها از نظر نوع عملکرد:
1-مطلق(ِAbsolute Encoder)
یکی از ایرادات انکودرهای افزایشی این است که شمارش پالسهای آن در یک میانگیر یا اکسترنال کانتر(Counter External)ذخیره می شود.اگر برق قطع شود و یا به هر حال اختلال پیدا کند شمارش گم خواهد شد زیرا نقطه ی صفر برای دستگاه به هنگام راه اندازی مجدد کم یا تعریف نشده است این بدان معناست که چنانچه قدرت را از یک ماشین الکتریکی با انکودری که دارای چرخاننده الکتریکی است بگیریم دیگر انکودر موقعیت صحیح را نخواهد دانست.برای حل این مشکا از انکودرهای مطلق استفاده می شود و در این صورت ماشین همیشه موقعیت خود را می داند. در انکودر مطلق دیسکی که دارای چندین گروه از قطعات به فرم دایره های متحدالمرکز در مرکز دیسک انکودر چرخشی است استفاده می شود.چنانچه حلقه به سمت محیط دایره برود هر یک از آن ها دارای دو برابر قطعه نسبت به حالت قبل و داخلی تر خود خواهند داشت
اولین حلقه که داخلی ترین حلقه هاست یک قسمت شفاف و یک قسمت تیره خواهد داشت وحلقه سوم از هریک از قطعات 4 قسمت خواهد داشت اگر انکودر دارای 10 حلقه باشد آخرین حلقه یا دورترین آن از مرکز دارای 512 قطعه می باشد چنانچه هر حلقه از انکودر مطلق دارای دو برابر قطعه از حلقه قبلب خود باشد بین شماره ها یک سیستم باینری برقرار می شود.در این نوع انکودر به ازای هر حلقه روی دیسک یک منبع نور و دریافت کننده آن وجود دارد.
2-افزایشی(Incremental)
اگر انکودر فقط دارای یک ردیف پالس باشد نمی تواند به درستی جهت چرخش را نشان دهد و باید دارای پالس دومی نیز باشد که به این منظور باید یک فرستنده و گیرنده نوری دیگر به مجموعه اضافه شود.بنابراین در لحظاتی که نمی توان جهت چرخش شفت را تشخیص داد(در لحظاتی که هر دو پالس یک منطقی ودر لحظاتی صفر منطقی هستند)نیاز به پالس سومی داریم که این پالس بر اثر یک دور چرخش کامل بوجود می آید که به آن پالس فرمان می گویند واز آن برای شمارش تعداد دوران نیز استفاده می شود.ویژگی های اصلی:
● 1000 پالس خروجی
● شفت داخلی با قطر 12 میلی متر
● نصب آسان در فضای کوچک
● چرخش آسان با کمترین نیرو
● تنوع در نوع خروجی
● ولتاژ تغذیه:%5± D 12-24 VDC






دیدگاه بگذارید